|
Scan-N-Plan
7.0.0
|
|
Scan-N-Plan
7.0.0
|
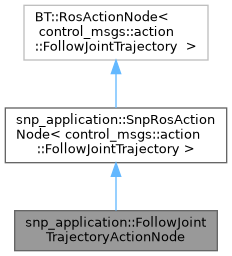
Calls a control_msgs/FollowJointTrajectory action.
Public Member Functions | |
| bool | setGoal (Goal &goal) override |
| BT::NodeStatus | onResultReceived (const WrappedResult &result) override |
 Public Member Functions inherited from snp_application::SnpRosActionNode< control_msgs::action::FollowJointTrajectory > Public Member Functions inherited from snp_application::SnpRosActionNode< control_msgs::action::FollowJointTrajectory > | |
| BT::NodeStatus | onFailure (BT::ActionNodeErrorCode error) override |
| BT::NodeStatus | setOutputAndCheck (const std::string &key, const OutputT &value) |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
Static Public Attributes | |
| static const std::string | TRAJECTORY_INPUT_PORT_KEY = "trajectory" |