Calls a snp_msgs/GenerateFreespaceMotionPlan service.
|
|
bool | setRequest (typename Request::SharedPtr &request) override |
| |
|
BT::NodeStatus | onResponseReceived (const typename Response::SharedPtr &response) override |
| |
|
BT::NodeStatus | onFailure (BT::ServiceNodeErrorCode error) override |
| |
|
BT::NodeStatus | setOutputAndCheck (const std::string &key, const OutputT &value) |
| |
|
|
static BT::PortsList | providedPorts () |
| |
|
|
static const std::string | MOTION_GROUP_INPUT_PORT_KEY = "motion_group" |
| |
|
static const std::string | TCP_FRAME_INPUT_PORT_KEY = "tcp_frame" |
| |
|
static const std::string | START_JOINT_STATE_INPUT_PORT_KEY = "start_joint_state" |
| |
|
static const std::string | GOAL_JOINT_STATE_INPUT_PORT_KEY = "goal_joint_state" |
| |
|
static const std::string | TRAJECTORY_OUTPUT_PORT_KEY = "trajectory" |
| |
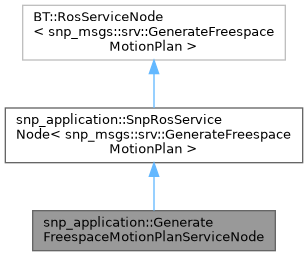
 Public Member Functions inherited from snp_application::SnpRosServiceNode< snp_msgs::srv::GenerateFreespaceMotionPlan >
Public Member Functions inherited from snp_application::SnpRosServiceNode< snp_msgs::srv::GenerateFreespaceMotionPlan >